Czym są sondy zbliżeniowe ?
Opublikowane: 06/01/2014 Filed under: Niezrzeszone | Tags: akcelerometr, prądy wirowe, sonda zbliżeniowa 1 komentarzJak wspomniałem w poprzednim wpisie który traktował o tym czym są prądy wirowe, efekt zaburzenia pola magnetycznego powstałego na skutek tworzenia się prądów wirowych wykorzystuje się w sensorach zwanych sondami zbliżeniowymi (ang. proximity probes).
W początkowych wpisach na tym blogu rozpisałem sie na temat tego jak działa akcelerometr, który jest najczęściej używanym sensorem w całej działce monitorowania kondycji maszyn wirujących. Nie znaczy to jednak, że innych rodzajów sensorów możnaby używać zamiast akcelerometru, ale po prostu z pewnych powodów nie jest to robione. Naturalnie każdy rodzaj czujnika dobiera się pod konkretne zastosowanie, jednak to właśnie akcelerometry posiadają najwiecej zalet w omawianej dziedzinie i działka analizy wibracji pochodzenia akcelerometrowego rozwinęła się najbardziej.
Temat zastosowania różnych czujników w różnych aplikacjach poruszyłem delikatnie w listopadowym wydaniu Przeglądu Mechanicznego, do którego link w wersji elektronicznej znajduje się tu: Przegląd Mechaniczny 11/2013, Diagnostyka maszyn wirujących, Paweł Rzeszuciński
Akcelerometr zazwyczaj montuje się na obudowie monitorowanych komponentów, gdyż daje to wystarczający stopień zagłębienia w monitorowaną strukturę aby postawić wiarygodną diagnozę, jednak w niektórych przypadkach zejście pod powierzchnię obudowy daje znaczną przewagę, szczególnie jeśli spodziewamy się, że na jej powierzchnie dotrze znacznie okrojona ilość pierwotnych informacji diagnostycznych. Taka sytuacja ma właśnie miejsce przy zagadnieniu diagnostyki łożysk ślizgowych, któremu poświecona zostanie następna notka.
Ale wracając do sond zbliżeniowych…u nasady sensorów umieszczone są zazwyczaj pewne źródła pola magnetycznego (stałego lub zmiennego, zależnie od zastosowania), którego celem jest promieniowanie poza obudowę sensora i przenikanie monitorowanych, przewodzących powierzchni (oddalonych od sensora o niewielką odległość). Zmienne pole magetyczne prowadzi z kolei do powstawania prądów wirowych w diagnozowanych powierzchniach i ostatecznie do indukowania pól magnetycznych. To jednen element układanki. Drugim jest fakt, że sonda zbliżeniowa posiada również element zdolny do pomiaru zmian interakcji pomiędzy polem pierwotnym i wyindukowanym – czyli wytwarzamy zmienne pole magnetyczne i mierzymy zmianę tego pola magnetycznego jako następstwo powstania prądów wirowych I tu dochodzimy do dwóch podstawowych zastosowań tego typu sensorów. Najczęściej spotykanym jest pomiar odległości pomiędzy sztywno zamocowanym sensorem a zmieniającym swe położenie elementem. Ze względu na relatywnie niskie wartości mierzonych wielkości, pomiary odległości w omawianych zastosowaniach są zazwyczaj rzędu mikrometrów, niekiedy milimetrów. Im odległość większa tym pole słabsze, im odległość mniejsza tym pole silniejsze. Intuicyjne. Drugim zastosowaniem jest pomiar odchyłki od ‚zdrowej’, oczekiwanej reakcji mierzonej powierzchni. Jeśli wiemy jakiej natury pole magnetyczne powinno się indukować, wtedy jesteśmy przygotowani na detekcję wszelkich odchyłek od stanu zdrowego powodowanych czy to defektami na powierzchni materiału czy niewidzialnymi dla oka zniszczeniami pod powierzchnią.
W następnym poście opiszę czym są łożyska ślizgowe i jak w diagnostyce tych elementów mogą być pomocne sondy zbliżeniowe.
Czym są prądy wirowe ?
Opublikowane: 01/01/2014 Filed under: Niezrzeszone | Tags: Faraday, Lenz, prądy wirowe, sonda zbliżeniowa, łożysko, ślizgowe 1 komentarzChcę napisać słów kilka o diagnostyce łożysk ślizgowych, a nieodłącznym elementem opisu są urządzenia do tego celu najczęściej wykorzystywane – sondy zbliżeniowe. Te z kolei najczęściej operują w oparciu o zjawisko tzw. prądów wirowych, stąd ta notka jest wprowadzeniem do tryptyku prądy wirowe->sondy zbliżeniowe->łożyska ślizgowe.
Zjawisko prądów wirowych osobiście uważam za jedno z bardziej hmm ciekawych użytkowo pasywnych źródeł oddziaływania. O co chodzi ? Trzeba nam wymieszać prawa dwóch tęgich głów – Faraday’a oraz Lenza. W myśl prawa tego pierwszego wiemy, że jeśli przewodnik elektryczny zostanie wystawiony na działanie zmiennego pola magnetycznego to w przewodniku owym dojdzie do powstania lokalnych różnic potencjałów co nierozłącznie wiąże się z przepływem ładunków elektrycznych. Nota bene przepływ ten jest niejako zamknięty tworząc ‚trajektorie’ ruchu ładunków przypominające wiry, stąd nazwa (ang. eddy currents). Ale wracając – przepływ ładunków elektrycznych jest niechybnie powiązany z indukowaniem pola magnetycznego, powstaje nam zatem drugie pole magnetyczne o pewnej ciekawej właściwości, wskazanej przez w/w Heinricha Lenza. Mianowicie to nowo wyindukowane pole magnetyczne ma taki kierunek że przeciwdziała ono polu które doprowadziło do jego powstania. Czyli: jest przewodnik (np. miedź) i zmienne pole magnetyczne (np. poruszający się magnes). Wyobraźmy sobie, że ruszamy magnesem wzdłuż miedzi – w jej wnętrzu dochodzi do lokalnego przepływu prądu, który indukuje pole magnetyczne działające dokładnie w przeciwnym kierunku niż nasze pierwotne, zmienne pole magnetyczne (to od magnesu). Innymi słowy to nowe pole stara się niejako powstrzymać ruch pierwotnego pola magnetycznego.
Indukowanie prądów wirowych jest z reguły zjawiskiem niepożądanym, zmniejszającym sprawność urządzeń, jednak człowiek nie byłby sobą gdyby nie potrafił wykorzystać potencjalnych minusów na własny użytek. No wiec ? Gdzie i jak można wykorzystać prądy wirowe ?
Osobiście najbardziej podoba mi się wykorzystanie w zupełnie autonomicznych i nie wymagających zewnętrznego zasilania systemach hamowania np. kolejek górskich w parkach rozrywki. W skrócie – mamy na stacji źródło stałego pola magnetycznego np. silny magnes neodymowy (aczkolwiek może być to równie dobrze np. elektromagnes). Kolejka górska posiada w podwoziu element przewodzący (o co nie trudno) z perspektywy którego to stałe pole magnetyczne jest de facto zmienne (bo kolejka się porusza). W wyniku wtargnięcia przewodnika w pole magnetyczne dochodzi do indukowania wtórnego pola magnetycznego o kierunku działania przeciwnym do pola pierwotnego, w wyniku czego dochodzi do hamowania całego układu. Bezpieczeństwo w najczystszej postaci.
Wiele zastosowań bierze się stąd, iż prądy wirowe są niemal natychmiast wytracane w przewodniku w postaci energii cieplnej. I tak kuchenne płyty indukcyjne opierają się o prądy wirowe gdzie w kuchence indukowane jest pierwotne pole magnetyczne (zmienne), a nasza patelnia czy nasz garnek posiadają element przewodzący i, ostatecznie, mocno grzejący się. Starsze typy mikrofałówek zachęcały do umieszczania np. aluminiowych łyżeczek w podgrzewanych płynach co miało znacznie przyspieszyć proces grzania. Co by tu jeszcze…automaty sprzedające np. batony wykorzystują efekt prądów wirowych do wykrywania przelatujących monet i ich nominałów – każda moneta spowoduje inne zaburzenie pola.
Efekt pomiaru zaburzenia pola związanego z powstawaniem prądów wirowych doprowadza mnie do zastosowania w układach o których napiszę w następnej notce – sondach zbliżeniowych wykorzystywanych przy diagnostyce łożysk ślizgowych.
Na deser polecam cały szereg filmików na znanym portalu, które w dość zadziwiający sposób demonstrują efekty wynikające z powstawania prądów wirowych. I tak dla przykładu klip poniżej pokazuje jak, bardzo silny z natury, magnes neodymowy, który w stanie spoczynku nie wchodzi w jakąkolwiek reakcję z metalami nie ferromagnetycznymi t.j. aluminium i miedzią, pod wpływem ruchu zaczyna odczuwać wpływ przeciwnie skierowanego pola magnetycznego. Efekt przetestowany osobiście podczas tworzenia stanowiska na zeszłoroczną Małopolską Noc Naukowców robi naprawdę piorunujące wrażenie. Cos mi tu zalatuje Matrixem…
Analiza obwiedni a transformata Hilberta
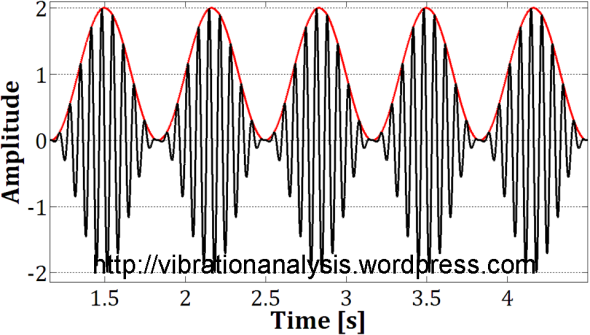
Opublikowane: 27/12/2012 Filed under: Niezrzeszone | Tags: defekt, filtr, obwiednia, rezonans, spektrum, transformata Hilberta, łożysko 1 komentarzW odpowiedzi na zapytanie Pana Mariusza w jednym z poprzednich komentarzy postanowiłem rozwiać wątpliwości odnośnie zastosowania analizy obwiedni (and. envelope analysis) sygnału i kiedy może ona nam się przydać. W poprzednich wpisach niejednokrotnie dotykałem kwestii modulacji amplitudy np. modulacja amplitudy lub defekty łożysk. Sugeruję rewizytę szczególnie pierwszego z podanych wpisów gdzie starałem się naświetlić istotę modulacji amplitudy. Bazując na już wiadomym, do klaryfikacji zagadnienia obwiedni weźmy zatem sygnał o częstotliwości 17Hz (fala nośna np. prędkość wału) modulowanego sygnałem o częstotliwości 1.5Hz (sygnał modulujący np. czestotliwość odpowiadająca uszkodzeniu kulki w łożysku). Zgodnie z przewidywaniem w spektrum sygnału widać 17Hz z dwiema wstęgami obcznymi oddalonymi o 1.5Hz, po jednej w pozytywnym i negatywnym kierunku.
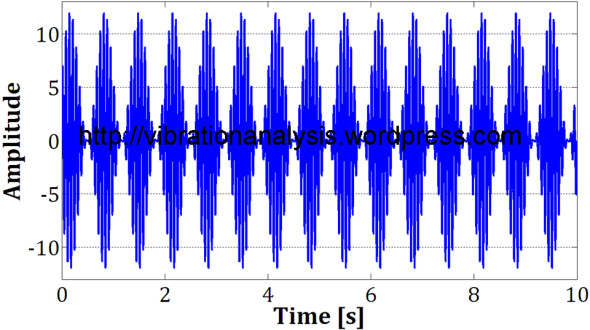
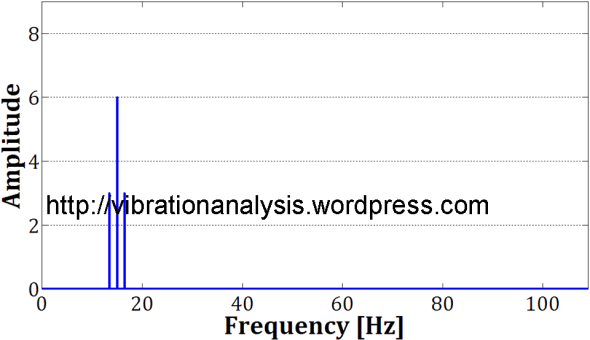
Wszystko czyściutkie. Fajnie. Wiadomo co się dzieje, bo sygnał zarówno w dziedzinie czasu i jak częstotliwości niesie jasne znamiona modulacji amplitudowej – diagnoza przy pomocy narzędzia przodków t.j. „nagiego oka” (a spokojnie też i ucha) wystarczyłaby w zupełności.
Co jednak jeśli sielanka zostanie zakłócona wszędobylskim szumem ? Rzućmy okiem na rysunek poniżej aby zobaczyć co dzieje się w dziedzinie czasu po dodaniu do rozpatrywanego sygnału pewnej ilości szumu Gaussowskiego ? Dla ułatwienia naniosłem oba sygnały na siebie.
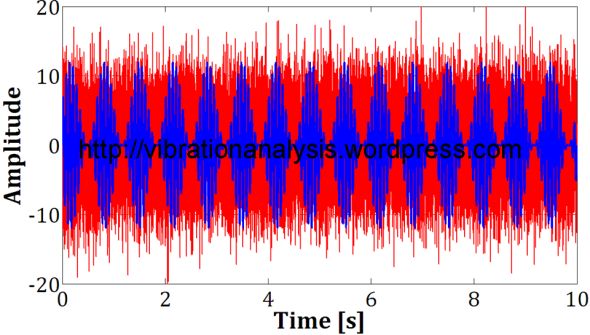
Już nie tak łatwo, co ? Oko zawodzi…jak widać modulacja, pomimo że wciąż obecna, ginie z pola widzenia przez wpływ szerokopasmowego szumu. Co zrobić…a co tam Panie w spektrum ? Zobaczmy:
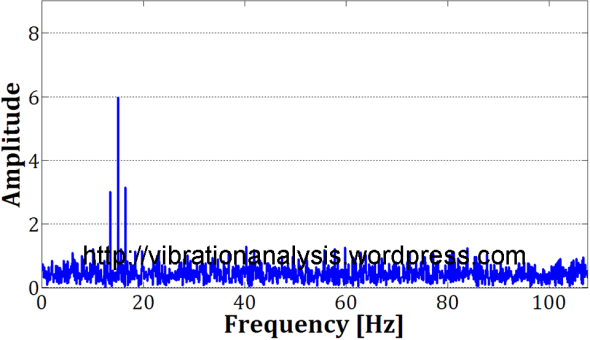
Uff. Powiem Ci, że wciąż całkiem nieźle. Widać wyraźnie nasze częstotliwości zainteresowania. Ale co jakby chcieć zautomatyzować proces detekcji i nie musieć przejmować się ‚niepotrzebnymi’ elementami spectrum i skoncentrować się tylko na tym co nas tak naprawdę interesuje (w naszym przypadku na wykryciu czy łożysko uległo zniszczeniu i diagnozie jaki konkretnie jego elementu wyzionął inżynieryjnego ducha – zakładając, że nie jest to z góry wiadome jak w naszym przypadku) ? Z pomocą przychodzi transformata Hilberta. Google + ‚transformata hilberta’ da wystarczająco wyników tym, których interesują wzory. Mnie interesuje co ona daje w rzeczywistości. Obwiednia to nic innego jak funkcja modulująca mój sygnał jak na przykładzie poniżej gdzie czerwonym kolorem zaznaczyłem rzeczoną obwiednię sygnału.
Wracając do naszego przykładu: wiedząc w jakim paśmie wystąpią częstotliwości, które chcę zdiagnozować aplikuję filtr pasmowo-przepustowy w rejonie zainteresowania (w moim przypadku region 17Hz +/- 1.5Hz z małym zapasem po obu stronach) a następnie „Hilbertuję” przefiltrowany sygnał (większość programów obliczeniowych posiada proste w obsludze funkcje do przeprowadzenia transformaty, w Matlbie jest to np. hilbert). Robię to po to, aby do minimum ograniczyć ilość informacji, które w danej chwili mnie interesują – chcę jedynie wiedzieć czy wokoło 17Hz są jakieś wstęgi boczne. W rezultacie „Hilbertowania” otrzymuję sygnał, którego spektrum pokazałem poniżej

Wow. Magia. Czary. Wszystko poszło weg a zostało tylko moje 1.5Hz. Diagnoza gotowa. Jeśli nie byłoby modulacji, spektrum miałoby rozkład zbliżony do normalnego rozkładu prawdopodobieństwa tj. żadnych wystających szczytów.
Ktoś zapyta: dobra, ale po co ci było filtrować sygnał i szukać obwiedni skoro prosto ze spektrum można by wywnioskować co jest grane. Zgoda, ale:
– obwiednia pozwala na łatwiejszą automatyzację procesu, zmniejszając prawdopodobieństwo nietrafionej diagnozy w sytuacji gdzie dookoła fali nośnej znajduje się mnóstwo częstotliwości o podobnej amplitudzie co domniemane wstęgi boczne.
– odrzucamy częstotliwości, które nie są nam w danej chwili potrzebne zwiększając przejrzystość wyników i zmniejszając ilość danych jakie trzeba przetworzyć (oszczędzając czas i zasoby).
– otrzymujemy sygnał, który po zastosowaniu odwrotnego FFT może by dalej przydatny w dziedzinie czasu.
W dodatku, nie zawsze oczywistym jest gdzie najszybciej pojawi się jakiś poszlak częstotliwości której szukamy. Opisując czym jest akcelerometer wspominałem, że rezonans tego sensora jest czasem używany w diagnostyce łożysk – charakterystyczne impulsy generowane przy uszkodzeniu łożysk są szerokopasmowe w dziedzinie częstotliwości – jeden impuls pobudza całe obserwowane pasmo, a gdy częstotliwość jest komponentem rezonansowym zostanie dużo mocniej pobudzona (więcej tu). Dlatego jednym z tajników diagnostyki łożysk jest filtracja sygnału w rejonie rezonansu elementów maszyny (często akcelerometrów, które z założenia częstotliwości te mają dość wysoko), a następnie analiza obwiedni celem zdiagnozowania czy jakiekolwiek charakterystyczne częstotliwości uszkodzeń wystają przed amplitudowy szereg, a jeśli tak to jakim defektom one odpowiadają.
Czym jest normalny rozkład prawdopodobieństwa ?
Opublikowane: 22/07/2012 Filed under: Niezrzeszone | Tags: normalny rozkład prawdopodobieństwa, odchylenie standardowe, przekładnia zębata, wartość średnia 1 komentarzW poprzednim linku naświetliłem kwestię wartości średniej i odchylenia standardowego. Pojęciem które pośrednio wynika z w/w zagadnień jest niesamowicie często występujący w przyrodzie motyw normalnego rozkładu prawdopodobieństwa. Na początek mus, tj. równanie normalnego rozkładu prawdopodobieństwa:

Jak widać jedynymi parametrami decydującymi o kształcie naszej krzywej są rzeczone odchylenie standardowe i wartość średnia naszego zestawu danych. Przedstawię istotę rozkładu prawdopodobieństwa na okrutnie książkowym przykładzie różnic wzrostu wśród mężczyzn. Gdy losowo wybierzemy dajmy na to 1000 mężczyzn z danej populacji i zmierzymy ich wzrost to na podstawie otrzymanego zestawu wartości (i w oparciu o posiadaną wiedzę z poprzedniego wpisu) będziemy w stanie określić wartość średnią spośród całej grupy oraz odchylenie standardowe wzrostu owej gromady. Podstawiając oba parametry do wzoru powyżej, obliczając wartość y dla każdej wartości x (tj. dla każdego wzrostu z naszych pomiarów) oraz kreśląc wykres wartości y w funkcji wartości odchylenia standardowego dopuścimy się stworzenia krzywej rozkładu prawdopodobieństwa wzrostu mierzonej populacji mężczyzn. Wykres nasz będzie przypominał ten przedstawiony poniżej gdzie na środku skali znajduje się wartość średnia a w obie strony odchodzą wartości odpowiadające wielokrotności odchylenia standardowego:

Wykres ten pomaga nam oszacować z jakim prawdopodobieństwem w danej populacji (którą będziemy określać na bazie naszej losowo wybranej grupy 1000 mężczyzn) losowo wybrany mężczyzna będzie miał interesujący nas wzrost. Załóżmy, ze wartość średnia wzrostu wyniosła 175cm, natomiast odchylenie standardowe 10cm. Załóżmy, ze interesuje nas prawdopodobieństwo, ze losowo wybrany mężczyzna będzie miał wzrost 189cm. Z wykresu powyżej dowiadujemy się , ze szanse wynoszą 13.5% a wiemy to stad gdyż 189cm leży w przedziale miedzy wartością średnią + 1* odchylenie standardowe a wartością średnią + 2* odchylenie standardowe.
Wszystko co w naturze występuje w sposób naturalny i nie jest modyfikowane w nienaturalny sposób ma duże szanse posiadania normalnego rozkładu prawdopodobieństwa. To z kolei pozwala zakładać wielkości pewnych parametrów z dużą dozą prawdopodobieństwa lub po prostu wnioskować o pewnych anomaliach gdy nagle pojawiające się wartości wychodzą poza model wzorowany na normalnym rozkładzie prawdopodobieństwa. W analizie wibracji zakłada się np. ze wibracje generowane przez przekładnie zębate maja rozkład normalny gdy pracują bez żadnych uszkodzeń a wykrycie odchyleń od tego rozkładu mają duże szanse być zwiastunami pojawiających się problemów mechanicznych.
P.S. wybaczcie słabą jakość wykresu i równania matematycznego ale tę notkę sporządzam na bardzo starej maszynie bez jakiegokolwiek środowiska obliczeniowego i bez żadnych narzędzi graficznych (oprócz Windosowskiego Painta który uratował tę notkę 🙂 )
Czym jest wartość średnia i odchylenie standardowe.
Opublikowane: 28/05/2012 Filed under: Niezrzeszone | Tags: Brazylia, konik, Liga Światowa, odchylenie standardowe, wartość średnia 1 komentarzZ pojęciem histogramu nieodzownie łączy się pojęcie rozkładu prawdopodobieństwa. Aby jednak płynnie przejść do tego tematu wypada mi wprowadzić dwa pojęcia bez których rozkład prawdopodobieństwa może wydać się straszniejszy niż w rzeczywistości jest.
Pojęcia wprowadzające to wartość średnia (ang. mean value) i odchylenie standardowe (ang. standard deviation). Wyobraźmy sobie, że chcemy kupić bilet na Ligę Światową siatkarzy. Pech chciał, żę gramy właśnie z Brazylią a w kasach już pustki. Jedyną deską ratunku pozostają koniki pod kasami. Odwiedziliśmy pięciu koników i zanotowaliśmy ceny. Wyniosły one w kolejności: 100, 800, 200, 600 i 1000 PLN. Nagle w przypływie pędu do wiedzy chcemy policzyć ile średnio musimy zapłacić za bilet, oraz jak bardzo, uśredniając, wartości te mają tendencje do oscylowania (dewiacji) wokół tejże wartości średniej.
Wartość średnia to nic innego jak suma naszych danych podzielona przez ich ilość. W naszym przypadku daje to (100+800+200+600+1000)/5=540PLN.
Odchylenie standardowe natomiast wyliczymy jako sumę w której od wartości każdej próbki naszej populacji odejmiemy wartość średnią całego zestawu, podniesiemy to do kwadratu, całość podzielimy przez ilość próbek w populacji a następnie z całego wyrażenia weźmiemy pierwiastek. Brzmi nieciekawie, ale przyklad opisany krok po kroku rozjaśni sprawę:
1) suma w której od wartości każdej próbki naszej populacji odejmiemy wartość średnią całego zestawu:
(100-540)^2+(800-540)^2+(200-540)^2+(600-540)^2+(1000-540)^2=592000
2)całość podzielimy przez ilość próbek w populacji:
592000/5=118400
3)z całego wyrażenia weźmiemy pierwiastek:
(118400)^(0.5)=344.0930
Tak więc dowiedzieliśmy się, że odchylenie standardowe naszej populacji to 344.0930 PLN czyli w takich granicach średnio oscyluję wartość biletu na Ligę Światową u koników.
Rycina poniżej przedstawia omówione wielkości. Widać wyraźnie, że czerwona linia symbolizująca wartość średnią ‚leci’ pośrodku wartości wyznaczanych linią niebieską (próbki populacji). Linia czarna natomiast pokazuje jak średnio wartości populacji czmychają od wartości średniej – niektóre wartości wiecej niż odchylenie standardowe (np. 1000PLN), niektórej mniej (np. 200PLN) ale uśredniając jest to rzeczone 344.0930 PLN.

Rośniemy
Opublikowane: 05/02/2012 Filed under: Niezrzeszone 1 komentarzPo roku od założenia bloga została przekroczona magiczna bariera 1500 unikatowych odsłon strony w miesiącu. Patrząc na zestawienie poniżej wyraźnie widać, że z każdym miesiącem przybywało głodnych wiedzy (za wyjątkiem spadków w lipcu i sierpniu – wakacje, oraz grudniu – Święta). Dzięki !

Czym jest histogram ?
Opublikowane: 15/01/2012 Filed under: Niezrzeszone | Tags: histogram 3 KomentarzeZanim przejdę do bardziej skomplikowanych aspektów monitorowania kondycji np. przekładni zębatych trzeba mi wprowadzić kilka podstawowych pojęć. Jednym z nich jest bardzo przydatne narzędzie – histogram.
Wikipedia podaje, że histogram to jeden z graficznych sposobów przedstawiania rozkładu empirycznego cechy- i już człowiek zagotowany.
Po ludzku – histogram to nic innego jak przedstawienie na wykresie ilości wystąpień danych zdarzeń. Przykład z życia wzięty: poszedłeś do salonu samochodowego i w czasie całej wizyty nie mogąc się zdecydować w którym aucie najlepiej się siedzi wchodziłeś do różnych modeli po kilka razy. Po całym dniu zagubiony w ilości wejść nie potrafisz stwierdzić w którym siedziałeś najczęściej. Zrób chopie histogram i tajemnica się rozwiąże.
Zakładamy, że w aucie nr 1 siedziałeś 1 raz, w aucie nr 2 – 2 razy, aucie nr 3 – 3 razy, aucie nr 4 – 4 razy, aucie nr 5 – 5 razy, aucie nr 6 – 4 razy, aucie nr 7 – 3 razy, aucie nr 8 – 2 razy i aucie nr 9 – 1 raz. Oczywiści nieważna jest kolejność wsiadania do poszczególnych modeli. Spójrzmy na histogram gdzie na osi X znajduję się numer auta, a na osi Y ilość wizyt w każdym z nich.

Widzimy jasno jak rozkłada nam się ilość zdarzeń dla poszczególnego modelu. Opcja histogramu w cyfrowych aparatach fotograficznych lub programach obróbki graficznej pozwala na zorientowanie się jak wygląda rozład pikseli posiadających odmienny stopień jasności. Wracając na pole monitorowania kondycji – tego typu informacje są ważne w śledzeniu zmian następujących w amplitudzie wibracji generowanych przez dany komponent. Każda bardziej permanentna zmiana musi mieć swoje źródło i wczesne rozpoznanie owych zmian daje więcej czasu do reakcji.
Filtracja sygnału a rodzaje filtrów.
Opublikowane: 10/09/2011 Filed under: Niezrzeszone | Tags: dolnoprzepustowy, filtr, górnoprzepustowy, spektrum, środkowoprzepustowy, środkowowozaporowy Dodaj komentarzW poprzedniej notce w której opisałem jak wykrywać defekty łożysk w spektrum wspomniałem, iż – cytuję:
warto przyglądać się obszarowi rezonansu elementów maszyny.
Jednym ze sposobów praktycznej realizacji owego stalkingu jest użycie bardzo popularnych w świecie cyfrowego przetwarzania sygnałów filtrów, które umożliwiają odseparowanie niechcianych elementów od tych interesujących nas. Gdy szukam w portfelu monety o nominale 1zł mój mózg automatycznie nakłada na oczy filtr który sprawia, że koncentruję się tylko i wyłącznie na konkretnym wyglądzie i rozmiarze monety. Filtry elektroniczne działają na podobnej zasadzie – pozwalają one na zdefiniowanie jaki obszar częstotliwości jest w kręgu naszych zainteresowań a następnie wyeliminuje cała resztę pozostawiając tylko rządany przedział.
Można rozróżnić 4 podstawowe rodzaje filtrów:
1: filtr dolnoprzepustowy (and. lowpass filter) przy pomocy którego definiujemy do jakiego zakresu częstotliwości mają pozostać nietknięte i tym samym od jakiej wartości cała reszta ma być odfiltrowana. Definicja filtru dolnoprzepustowego od np. 100Hz oznacza, że komponenty od 0Hz do 100Hz pozostaną w spektrum, a cała reszta zostanie poproszona o opuszczenie sali. Filtr dolnoprzepustowy zazwyczaj symbolicznie prezentuje się jak na rysunku poniżej:

2: filtr górnoprzepustowy (and. highpass filter) gdzie precyzujemy od którego momentu częstotliwości mają być obecne w sygnale a wszystko co poniżej zdefiniowanej granicy zostanie stracone. Rysunek poniżej przedstawia ideę:

3: filtr środkowoprzepustowy (lub pasmowoprzepustowy) (ang. bandpass filter) gdzie mamy moc pozostawienia w sygnale tylko pewnej części pasma np. od 10Hz do 150Hz a wszystko co poniżej i powyżej pożegna się z zabawą. Schematyczna zasada działania wygląda tak:
 4: filtr środkowozaporowy (lub pasmowozaporowy) (ang. bandstop filter) czyli sytuacja przeciwna do filtru środkowoprzepustowego – definiujemy która część pasma ma być wyproszona ze spektrum a cała reszta pozostanie nietknięta jak na rycinie poniżej:
4: filtr środkowozaporowy (lub pasmowozaporowy) (ang. bandstop filter) czyli sytuacja przeciwna do filtru środkowoprzepustowego – definiujemy która część pasma ma być wyproszona ze spektrum a cała reszta pozostanie nietknięta jak na rycinie poniżej:

Defekty łożysk – detekcja w spectrum
Opublikowane: 03/09/2011 Filed under: Niezrzeszone | Tags: BPFI, BPFO, BSF, częstotliwość, defekt, FFT, FTF, modulacja amplitudowa, rezonans, łożysko 2 KomentarzePoprzednia notka tyczyła się sposobów obliczania częstotliwości defektów łożysk. Tak, obliczenia to krok pierwszy. Ważniejszym jednak jest rozpoznanie i zdiagnozowanie odpowiednich częstotliwości w spektrum danego sygnału. Sprawa nie jest tak prosta jak mogłoby się wydawać: nie wystarczy jedynie dokonać transformaty FFT na naszym sygnale i zlokalizować czestotliwości odpowiadające odpowiednim defektom. Energia zawarta w tych komponentach nie jest na tyle duża aby wyraźnie wystawać ponad dużo głośniejsze składowe wibracji przez co ginie z pola widzenia w ich otoczeniu.
Jest jednak pewna właściwość przedmiotów, która pozwala na dużo łatwiejsze (co nie zawsze oznacza, że łatwe) znajdywanie oznak usterek. O właściwościach tych pisałem przy okazji charakteryzowania akcelerometrów – i chodzi tu o częstotliwości własne, tudzież rezonansowe przedmiotów. Trzeba wiedzieć, że sygnał o charakterze impulsowym pobudza bardzo szerokie spektrum częstotliwości. W tym samym czasie uderzenia powodowane defektami łożysk mają jak najbardziej charakter impulsowy właśnie – dynamiczny kontakt ‚metal o metal’ zawsze prowadzi do generacji impulsów. Dobra – rezonans, impuls, szerokie spektrum częstotliwości – podsumowuj powoli człowieku bo się gubię…
Załóżmy, że uszkodziła nam się kulka w łożysku. Pewna jej część ukruszyła się, w rezultacie czego powstała chropowata powierzchnia tam gdzię ubytek miał miejsce. Kulka obracając się uderza impulsowo (i okresowo) o ‚zdrową’ powierzchnię pierścieni łożyska. Generowany jest impuls. Impuls ten, gdy popatrzymy na wytworzoną wibrację w dziedzinie częstotliwości, pobudza szereg komponentów w całym dostępnym paśmie. Bardzo prawdopodobne, że w skład tych komponentów wchodzi częstotliwość rezonansowa np. akcelerometru lub obudowy łożyska. Jak wiemy z notki o rezonansie, ma on właściwość wzmacniania wszelkich częstotliwości, które znajdują się w jego regionie.
Czego mamy szukać w spektrum zatem ? Ano warto przyglądać się obszarowi rezonansu elementów maszyny i szukać równomiernie rozmieszczonych – w odległości odpowiadającej obliczonej częstotliwości defektu łożyska – wystających ponad poziom szumu częstotliwości.
Jest jeszcze jedna ważna kwestia: modulacja amplitudy. Skup się. Sygnał o częstotliwości defektu pierścienia zewnętrznego nie będzie podlegał temu zjawisku, gdyż pierścień zewnętrzny nie przemieszcza się w trakcie pracy. Każdy kontakt jaki nastąpi (pomiędzy uszkodzoną powierzchnią pierścienia a ‚zdrową’ kulką) bedzie zawsze w tym samym miejscu więc akcelerometr (który naturalnie nie zmienia swej pozycji) bedzie odbierał sygnał z taką samą mocą i z tego samego kierunku. Inaczej ma się sprawa w przypadku pierścienia wewnętrznego który – osadzony na obracającym się wale – również podlega rotacji. Tutaj każdy kontakt między uszkodzoną powierzchnią pierścienia a kulką bedzie miał miejsce w innym punkcie obrotu wału przez co akcelerometer będzie odbierał sygnały z różnych miejsc i o różnym natężeniu. Z racji, że pierścień obraca się z częstotliwościa równą częstotliwości obrotu wału, komponenty widoczne w spektrum i odpowiadające defektowy pierścienia, będą modulowane prędkością wału co ukaże się w spektrum w formie wstęg bocznych. W przypadku defektu kulki będzie miała miejsce podobna modulacja jak w przypadku pierścienia wewnętrznego, jednak tym razem częstotliwości oddalone o obliczoną wartość BSF (patrz wzory w poprzedniej notce) będa modulowane przez FTF – gdyż dokładnie tyle czasu zajmuje jednej kulce przebycie pełnego cyklu wewnątrz łożyska. Trochę to skomplikowane, wiem, ale zastanów się nad tym na spokojnie a na pewno zauważysz sens.
Szkic poniżej przedstawia opisane zależności modulacji kolejno dla BPFO, BPFI i BSF. Odległości między poszczególnymi częstotliwościami w każdym z trzech przypadków na rysunku jest taka sama, jednak w rzeczywistości- zgodnie z opisem – bedzie ona zależała od obliczonych wartości częstotliwości defektów.

Defekty łożysk – obliczenia
Opublikowane: 03/09/2011 Filed under: Niezrzeszone | Tags: BPFI, BPFO, BSF, częstotliwość, defekt, FTF, prawo ironii losu, łożysko 1 komentarzMonitorowanie kondycji maszyn polega na sprawdzaniu czy dany układ pracuje prawidłowo, a jeśli coś wygląda nie tak jak powinno – trzeba postawić diagnozę co się dzieje. Okej, załóżmy zatem, że w naszym przypadku dzieje się coś złego z łożyskiem. Ta notka odpowie na pytanie co może się łożysku przytrafić i jak określić częstotliwość odpowiadającą konkretnym defektom .
Czym jest łożysko i z jakich elementów się składa opowiadałem w dedykowym wpisie. Wiemy już zatem, że głównymi składowymi łożysk są: pierścień zewnętrzny, pierścień wewnętrzny, kulki oraz koszyk. Co się może zatem popsuć ? Hmm idąc przykladem jednego z polskich banków wymyślę sobie coś co nazwę Prawem Ironii Losu numer na przykład 101 i palnę, iż jeśli coś może się popsuć to popsuje się na pewno (pozdrawiam prawa pana Murphy’ego). Okej – nic odkrywczego zatem. Nas interesuje jednak jak daną usterkę wykryć w gąszczu częstotliwości generowanych przez maszynę. Z racji, że łożysko pracuje w bardzo przewidywalny sposób, nie trudno jest obliczyć jaką częstotliwość będzie generowała dana usterka. I tak posłużę się szeroko prezentowanymi w literaturze wzorami. Życie na szczęście nie jest polską szkołą gdzie wszystkie wzory świata trzeba umieć na pamięc przed sprawdzianem, ale bardziej szkołą fińską, gdzie po wzory sięgamy do źródeł. W tym akurat wypadku informacji dobyłem z poniższej publikacji dostępnej (za opłatą $35) w cudnym serwisie Science Direct.
„A comparison of some vibration parameters for the condition monitoring of rolling element bearings„, N.Tandon, Measurement, Vol. 12, p.285-289, 1994
Zestawienie poniżej przedstawia wzory na podstawie których obliczyć można poszczególne częstotliwości defektów elementów łożysk
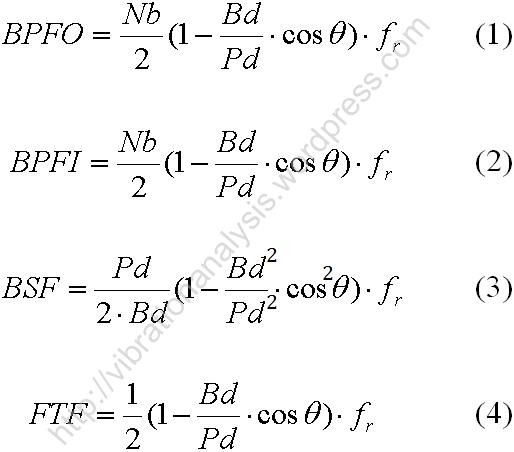
gdzie: BPFO – Ball Pass Frequency Outer – Częstotliwość defektu pierścienia zewnętrznego, BPFI – Ball Pass Frequency Inner – Częstotliwość defektu pierścienia wewnętrznego, BSF – Ball Spin Frequency – Częstotliwość defektu kulki, FTF – Fundamental Train Frequency – Częstotliwość defektu koszyka, Nb – Number of balls – ilość kulek w łożysku, Bd – Ball diameter – średnica kulki, Pd – pitch diameter – odległość między przeciwległymi kulkami w łożysku, θ – Contact angle – kąt pomiędzy kulkami a pierścieniami, fr – prędkość obrotu wału na którym dane łożysko pracuje.
Wszystkie informacje znajdujące się po prawej stronie znaków równości są zazwyczaj dostarczane przez producenta łożysk. Wystarczy trochę pogrzebać w katalogach. Niestety – nie każdy producent (jak na przykład potentat SKF) chce się chwalić detalami swoich produktów i zamiast podawać szczegółowe dane, umieszcza w internecie kalkulatory lub wręcz gotowe wartości częstotliwości defektów (zależne od prędkości wału oczywiście). Jak ktoś ufa i nie lubi liczyć – jak znalazł.
W następnej notce opiszę w jaki sposób szukać tych częstotliwości w spektrum wibracji generowanych przez wadliwy komponent.

{kind=link}